专注微型电机设备制造商
多年微型电机生产经验全国服务热线:
18617037952

全国服务热线:
18617037952

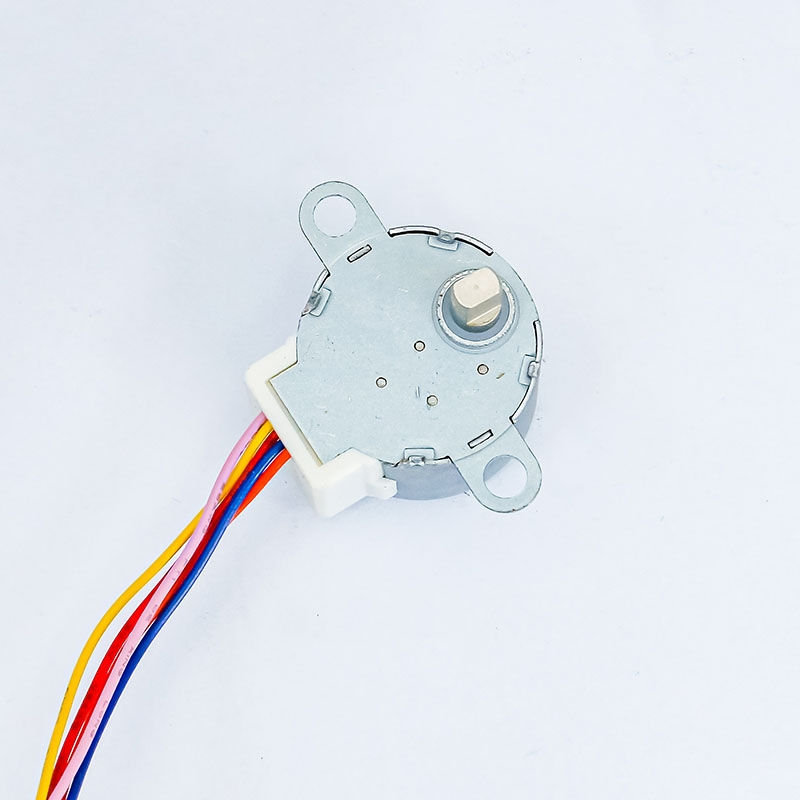
步进电机控制器是一种将电脉冲转换为角速度的执行器。当步进驱动器接受到一个脉冲数据信号,它就驱动器步进电机按设置的方位旋转一个固定不动的视角(称之为“横距角”),它的转动是以固定不动的视角一步一步运作的。步进电机厂家能够根据操纵脉冲数量来操纵角速度量,进而做到准确精准定位的目地;另外能够根据操纵脉冲频率来操纵电机旋转的速率和瞬时速度,进而做到变速和精准定位的目地。
步进电机按构造归类:步进电动机也叫脉冲电机,包含反应方程步进电动机(VR)、稀土永磁式步进电动机(PM)、混合式教学步进电动机(HB)等。
(1)反应方程步进电动机:也叫感应、涡流损耗式或磁电式式步进电动机。其电机转子均由铁磁性材料做成,电机定子上分布均匀的大地磁极上配有多组分励磁调节器绕阻,定、电机转子附近分布均匀小齿和槽,插电后运用磁导的转变造成转矩。一般为三、四、五、六相;可完成大转矩輸出(耗费输出功率很大,电流量大达到20A,驱动器工作电压较高);横距角小(最少可保证10');关闭电源时无精准定位转矩;电机内减振较小,单步运作(指脉冲频率很低时)波动時间较长;起动和运作频率较高。

(2)稀土永磁式步进电动机:一般电机电机转子由永磁铁氧体做成,铁磁性材料做成的电机定子上面有多组分励磁调节器绕阻,定、电机转子附近沒有小齿和槽,插电后运用永磁材料与电机定子电流量电磁场相互影响造成转矩。一般为二相或四相;輸出转矩小(耗费功率较小,电流量一般低于2A,驱动器工作电压12V);横距角大(比如7.5度、15度、22.5度等);关闭电源时具备一定的维持转矩;起动和运作频率较低。
(3)混合式教学步进电动机:也叫稀土永磁反应方程、稀土永磁感应步进电动机,混和了稀土永磁式和反应方程的优势。其电机定子和四相反应方程步进电动机沒有差别(但同一相的2个地磁极相对性,且2个地磁极上绕阻造成的N、S旋光性务必同样),电机转子构造比较繁杂(电机转子內部为圆柱型磁铁,两边外衣铁磁性材料,附近有小齿和槽)。一般为二相或四相;须提供正负极脉冲数据信号;輸出转矩较稀土永磁式大(耗费输出功率相对性较小);横距角较稀土永磁式小(一般为1.9度);关闭电源时无精准定位转矩;起动和运作频率较高;发展趋势迅速的一种步进电动机。