专注微型电机设备制造商
多年微型电机生产经验全国服务热线:
18617037952

全国服务热线:
18617037952

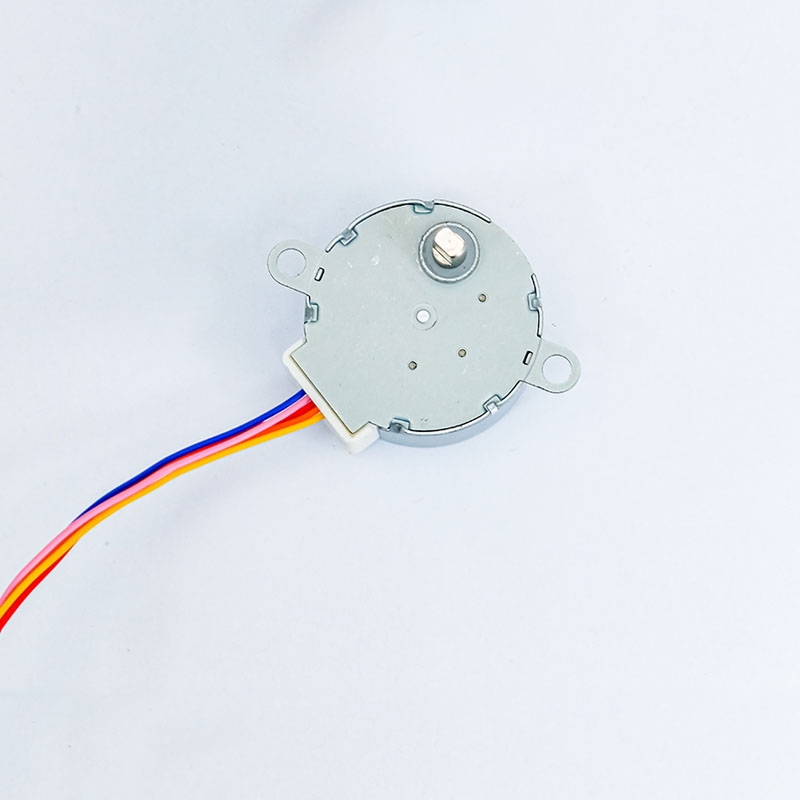
步进电机构造和原理:
1.步进电机是将脉冲电流数据信号变化为角速度或线偏移的开环控制元器件。在非超重的状况下,电机的转速比、终止的部位只在于操纵差分信号的頻率和脉冲数。
2.脉冲数越多,电机旋转的视角越大。3.单脉冲的頻率越高,电机转速比越快,但不可以超出大頻率,不然电机的扭矩快速减少,电机不转。
按扭矩造成的基本原理可分成:
(1)反应方程:电机转子无绕阻,由被励磁电流的电机定子绕阻造成反映扭矩完成步进电机运作
(2)励磁电流式:定、电机转子均有励磁电流绕阻(或电机转子用磁瓦),由电磁感应扭矩完成步进电机运作
按輸出扭矩尺寸可分成:
(1)伺服电机式:輸出扭矩在百分之几之几至十分之几(N.m)只有驱动器较小的负荷,要与液压机扭距放大仪适用,才可以驱动器十字滑台等很大的负荷(2)输出功率式:輸出扭矩在5~50 N.m之上,能够 立即驱动器十字滑台等很大的负荷按电机定子数可分成:(1)单电机定子式
(2)双电机定子式
(3)三电机定子式
(4)多电机定子式

步进电机厂家按各相绕阻遍布可分成;
(1)轴向分布式系统:电机各相按圆上先后排序
(2)径向分布式系统:电机各相按径向先后排序 电机轴向遍布步进电机原理: 当A相绕阻通以直流电电流时相绕阻通以直流电电流时,依据电磁场理论基本原理,便会在便会在AA方位上造成一电磁场,在电磁场磁场力的功效下,吸引住电机转子,使电机转子的齿与电机定子AA地磁极上的齿两端对齐。
若A相关闭电源,B互通电,这时候新的电磁场其磁场力又吸引住电机转子的两方面与BB地磁极齿对两端对齐,电机转子沿反方向掉转60°。一般 ,步进电机绕阻的通关闭电源情况每更改一次,其电机转子掉转的视角称之为横距角。
假如操纵路线不断地按假如操纵路线不断地按 A →C →B→ …的顺序程序步进电机绕阻的导通,步进电机的电机转子便不断地顺时针方向旋转。若接电源次序改成A →B →C →A …,同样,步进电机翻转。
1、所述详细介绍的是三相单三拍的工作中全过程,除此之外也有三相双三拍,三相六拍等工作方式。三相双三拍的得电方法另外两相绕阻接电源:如AB-BC-CA一AB一... 三相六拍的操纵方法是: A→AB→B→BC→C→CA→A→...
2、电机的转速比和零线火线转换的頻率相关,转换得越来越快,电机旋转的越来越快。电机旋转的方位和零线火线相关。3、电机每拍旋转的视角,称横距角θ。横距角和电机的构造相关。θ=360°/mzk 在其中m为电机定子绕阻的相数。Z为电机转子得齿数。K为接电源方法,m相时m拍时,k=1, m相1m拍时,k=2。